Arduino Smart Car Robot Kit experiment test
1〠Design theme
Integrate the software and hardware knowledge learned and mastered in the course, introduce the Arduino intelligent control device made by yourself, and the practical problems solved by the project,Microbit smart car
Questions and functions.ROBOT CAR KIT
2〠Basic content
Project design scheme: clearly explain the design ideas, software and hardware conditions and the feasibility of realizing the design objectives.
Hardware design: hardware function and structure overview, main module function description, hardware design circuit diagram, circuit function description
Software design: overview of software function design, program flow chart, function description of flow chart, source code of main program and program module
Debugging process: circuit construction, experimental debugging, function test and result description
Summary and Reflection: the realization degree of design task objectives, problems and solutions in the experiment, reflection and improvement
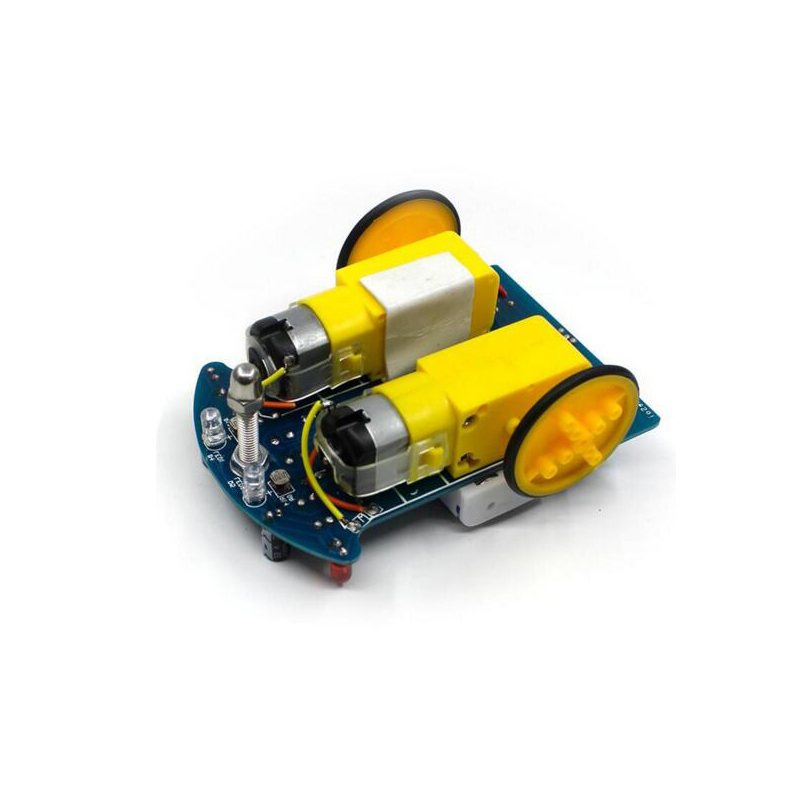
III hardware module
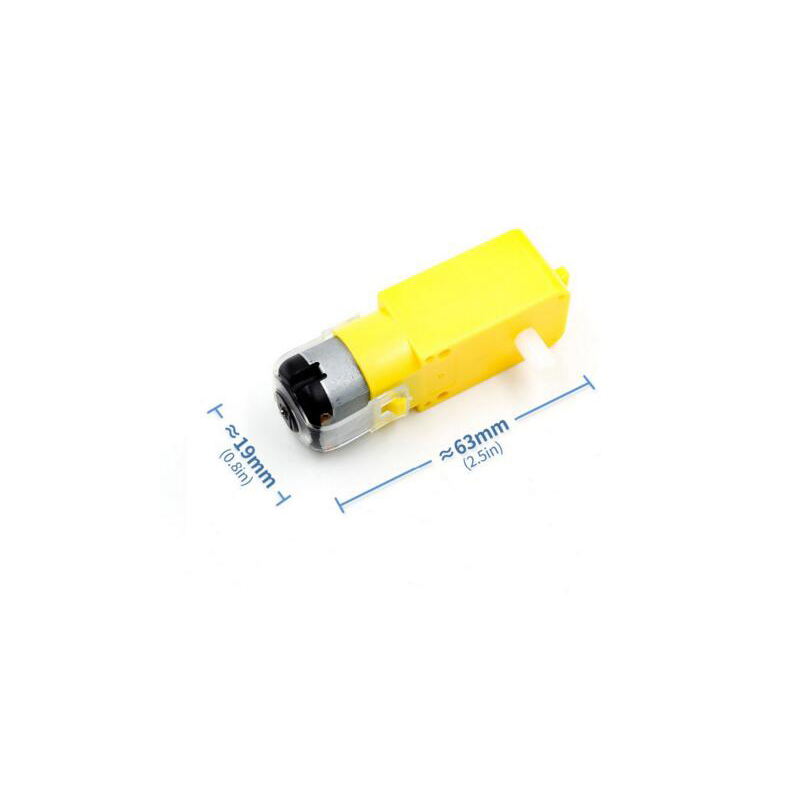
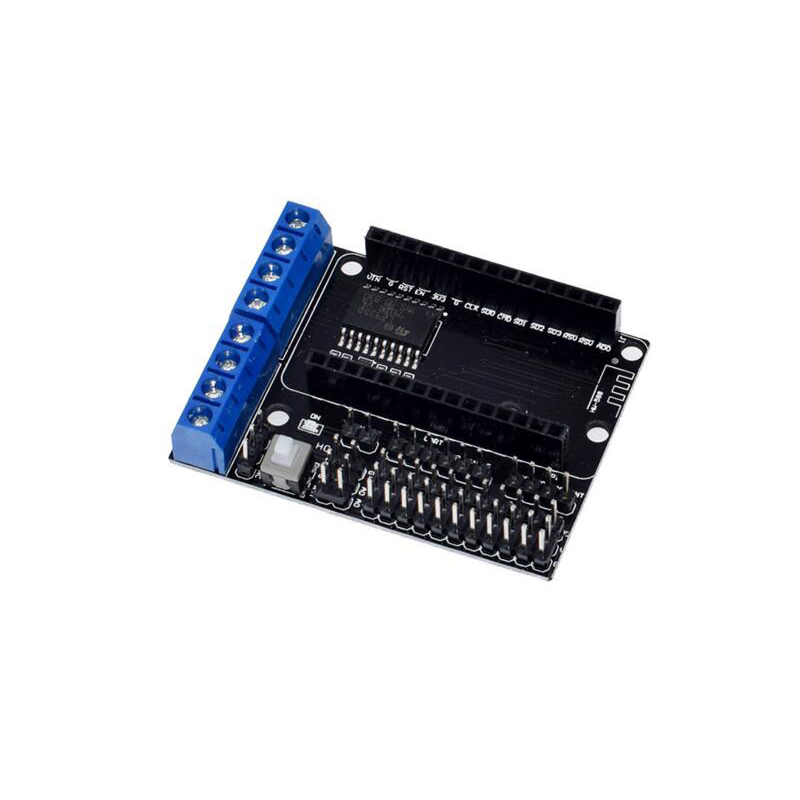
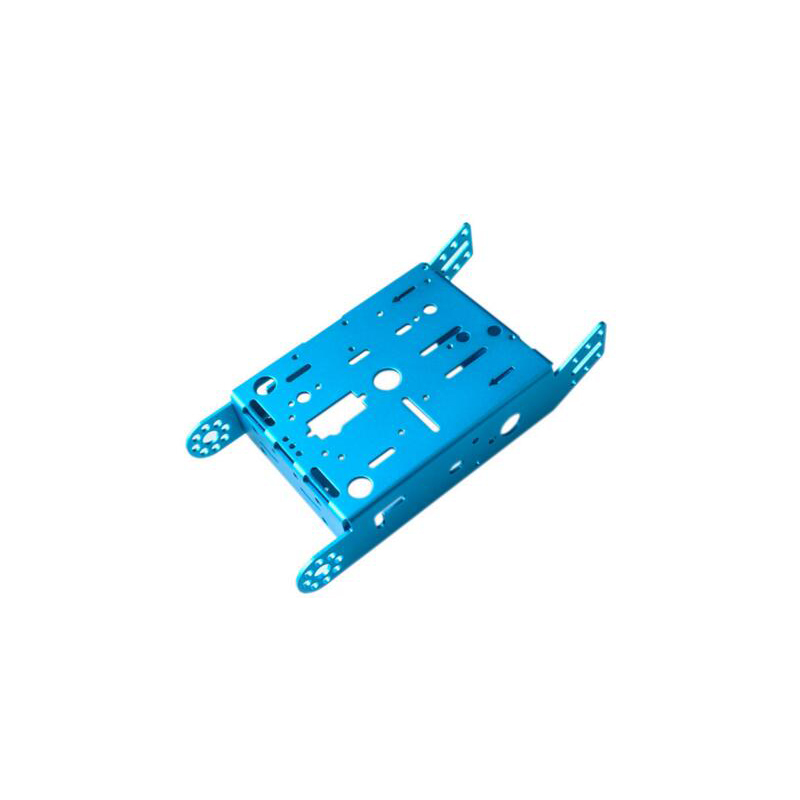
It mainly includes: smart car chassis, infrared remote control sensor, PS / 3 double axle rocker, L298N double motor drive module, DC motor and electric motor
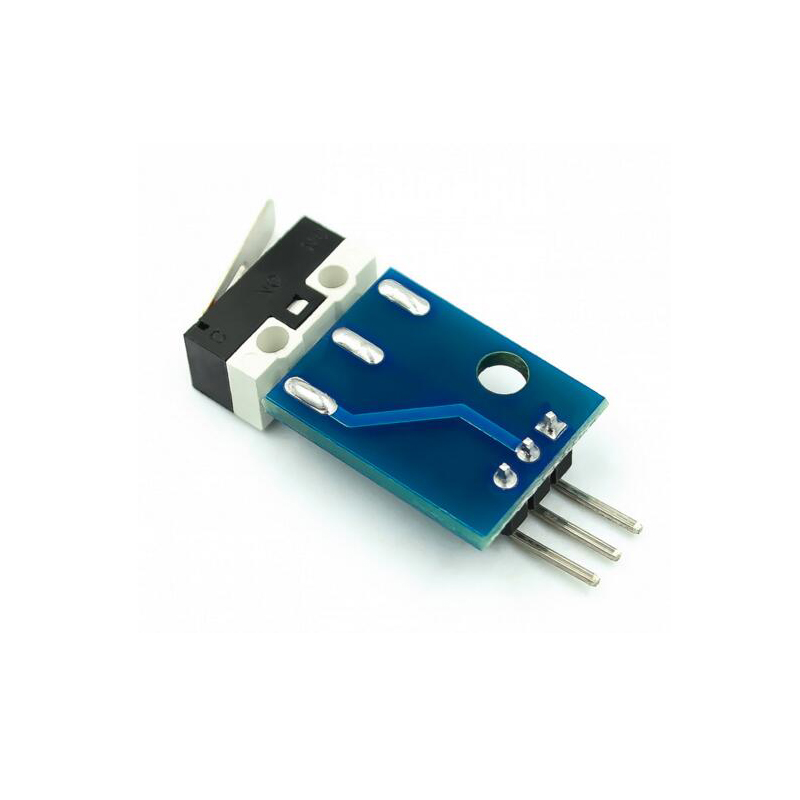
Pool group, ultrasonic sensor, infrared tracking sensor, infrared obstacle avoidance sensor, anti-collision switch
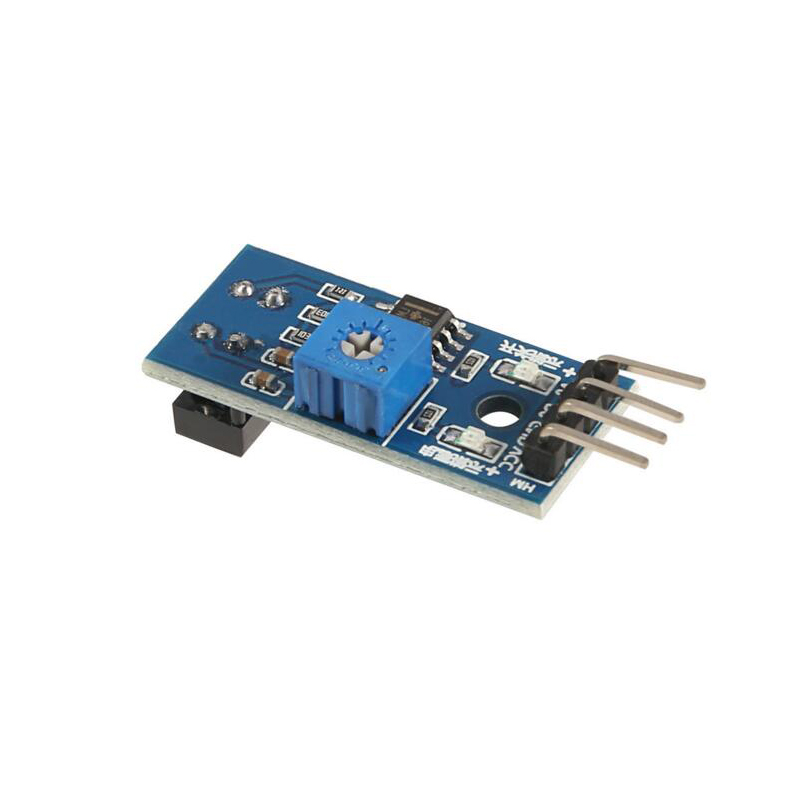
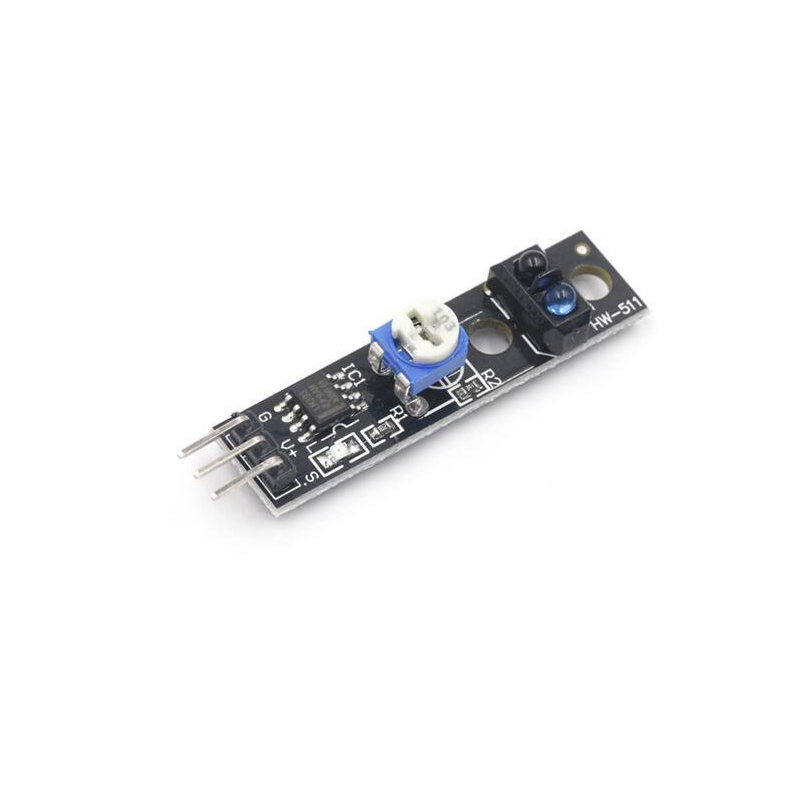
Infrared tracking sensor
The infrared tracking sensor is composed of a pair of infrared transmitting and receiving tubes. The transmitting tube emits infrared with a certain frequency. When the detection direction encounters obstacles, the infrared is reflected back and received by the receiving tube. After being processed by the comparator circuit, the signal output port outputs a digital signal. The detection distance can be adjusted through the potentiometer knob, and the effective distance range is 2-30cm, The working voltage is 3.3-5v. Using the characteristics that infrared has different reflection intensity on the surface of objects with different colors, the infrared tracking sensor judges whether the car is running on the black (or white) track according to the strength of the infrared reflection signal received by the infrared receiver, so as to judge the running position state of the car.ROBOT CAR KIT
Circuit schematic diagram of infrared tracking sensor
Infrared tracking principle of patrol car
Car tracking is that the car moves along the black line on the white floor, usually using infrared detection method. The car continuously emits infrared light to the ground during driving. When encountering the white ground, strong diffuse reflection occurs, and the reflected light is received by the infrared receiving tube; If it encounters black ground, it will be strongly absorbed, and the infrared receiving head cannot receive infrared light or is weakly received. The Arduino main control board determines the position of the black line and the forward route of the trolley according to the reflected infrared light.
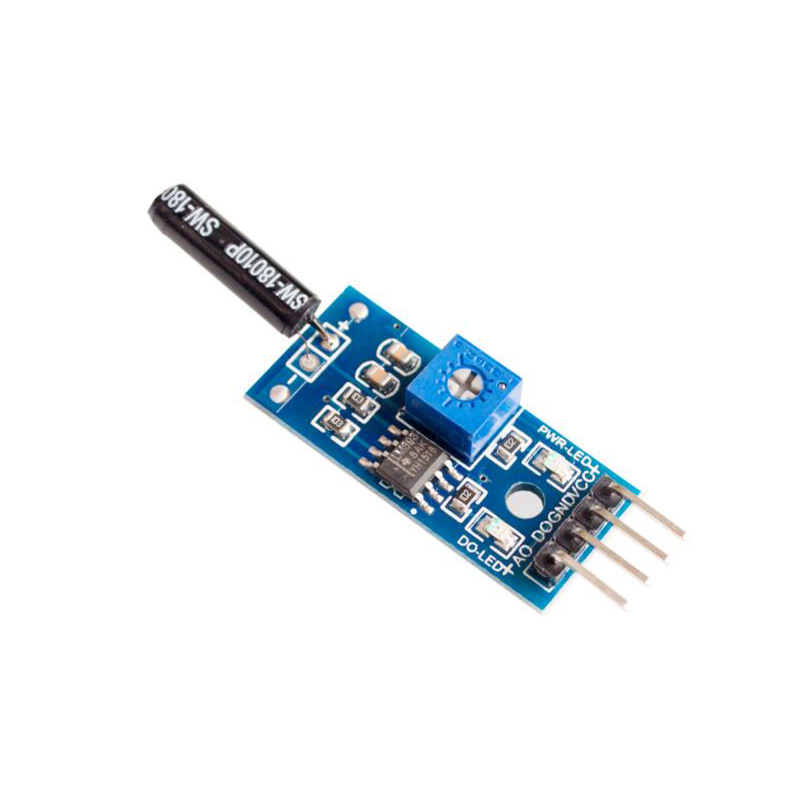
Infrared obstacle avoidance sensor
The infrared obstacle avoidance sensor is composed of a pair of infrared transmitting and receiving tubes. The transmitting tube actively emits infrared with a certain frequency. When the detection direction encounters an obstacle, the infrared is reflected back and received by the receiving tube. After being processed by the comparator circuit, the signal output port outputs a digital signal. When an obstacle is detected, the signal output port continuously outputs a low-level signal. The detection distance can be adjusted through the potentiometer knob. The effective distance range is 2-30cm and the working voltage is 3.3-5v.
Infrared tracking principle of line patrol car car tracking is that the car moves forward along the black line on the white floor, usually using infrared detection method. The car continuously emits infrared light to the ground during driving. When encountering the white ground, strong diffuse reflection occurs, and the reflected light is received by the infrared receiving tube; If it encounters black ground, it will be strongly absorbed, and the infrared receiving head cannot receive infrared light or is weakly received. The Arduino main control board determines the position of the black line and the forward route of the trolley according to the reflected infrared light.Arduino-enabled smart car,Arduino robot smart car
Smart car supporting resources:
The sensors of smart car generally adopt infrared tube, metal switch, ultrasonic ranging, acceleration sensor, compass sensor, steering gear, DC motor, L298N controller, etc.DIY Education Robot Smart Car Kit,Practice Learning Kit Smart Car Soldering Project Kits,DIY Smart Car For Arduino Robot Education
NINGBO FBELE ELECTRONICS CO.,LTD.
FBELE company was founded in 1997, is China's leading manufacturer of acoustic and other electronic components, we designs,manufactures, distributes high quality products in very competitive price, bestservice, timely delivery, small order acceptable, etc. Our products include piezo ceramic element, piezoelectric buzzer, magnetic buzzer,speakers, transducer, receiver, electret condenser microphone, magnetic contact. Piezoelectric alarm,ultrasonic sensor,PZT ceramics,etc.
- Following 0
- Followers 0
- Send Msg